下载各类工具及设计插件
下载各类工具及设计插件
 使用选型工具
使用选型工具
 收藏各类设计资料
收藏各类设计资料
 发表提问互动
发表提问互动

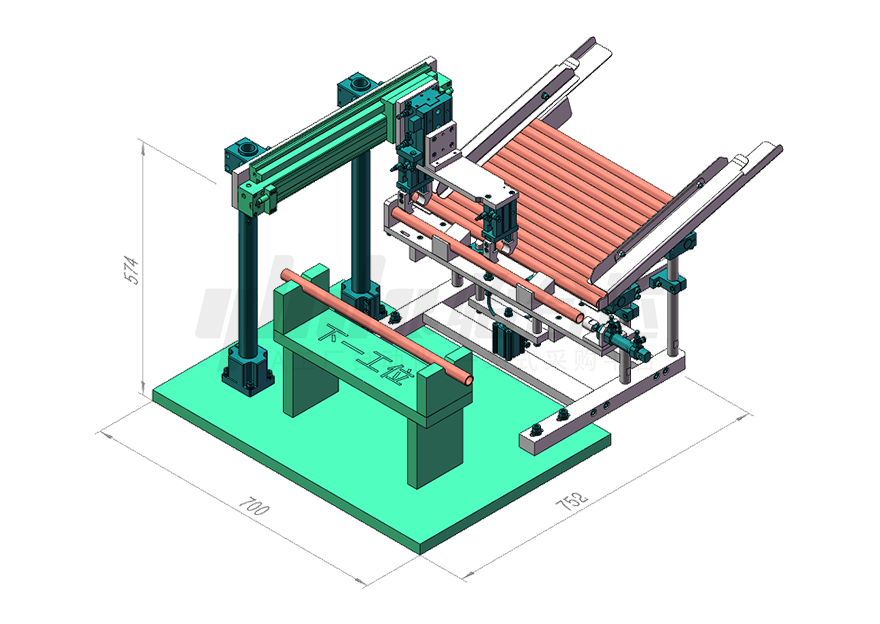
| 一、设计思路 | |
| 设计目的: | 此机械手针对电子元器件的底带包装设计,可实现高速取放动作,适用与各类IC芯片,以及贴片式电阻电容晶体管等等。 |
| 设定场景: | 电子元器件的底带包装取放料,以及类似产品的高速取放。 |
| 动作流程: | 1.工人将产品倒入振动盘。 |
| 2.将产品振动盘将产品送入直振送料轨道。 | |
| 3.伺服电机控制机械手吸盘将产品取走。 | |
| 4.机械手将产品放入包装底带料槽内(完成一个动作节拍)。 | |
| 5.机械手不断地往复取放产品,实现高速运转。 | |
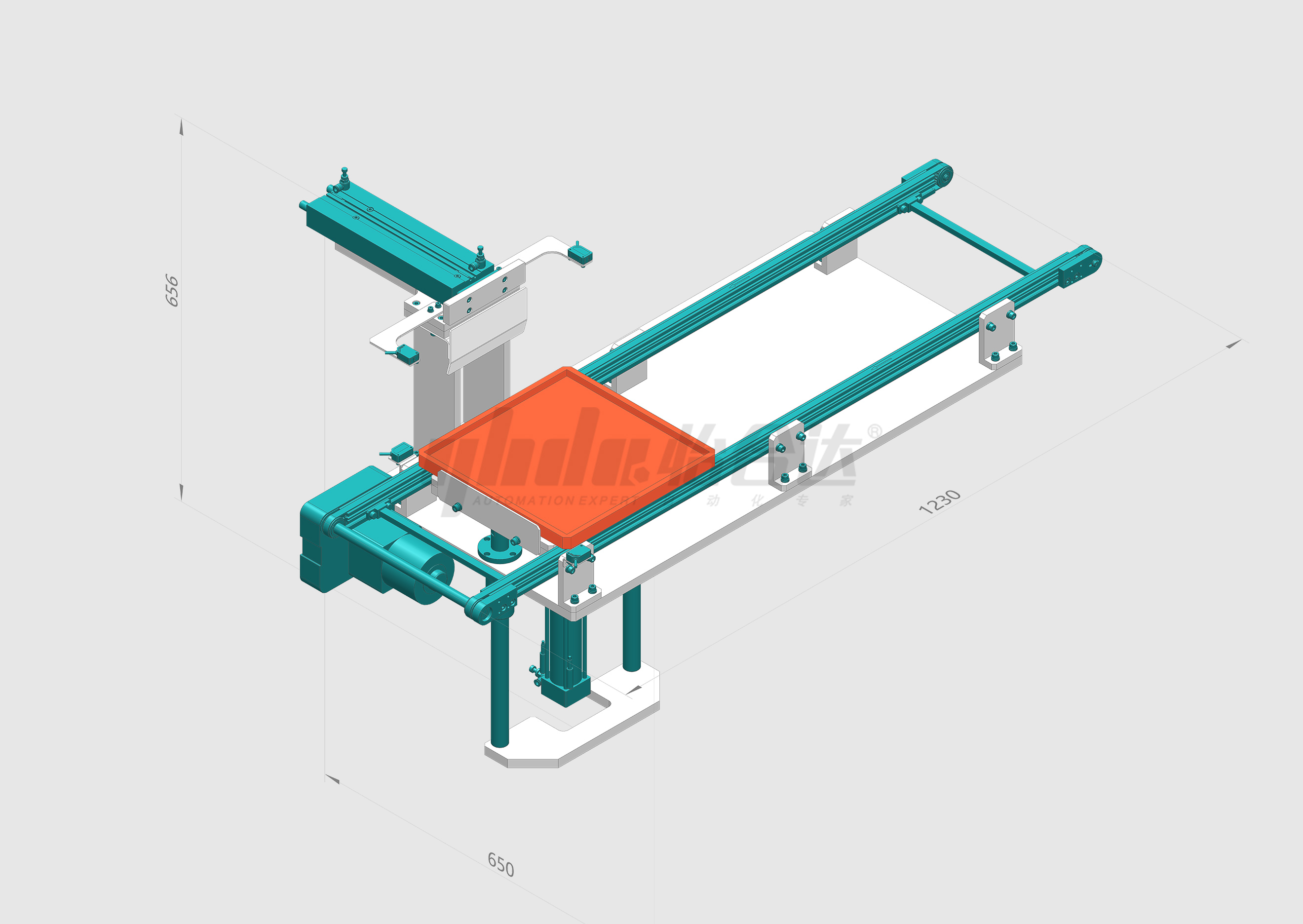
| 二、结构参数 | |
| 外形尺寸: | L800 x W500 x H416(mm) |
| 通用性: | 适用于类似外形尺寸的多种电子元器件或者产品 |
| 循环周期: | 0.5S |
| 精度: | 200mm±0.1(mm) |
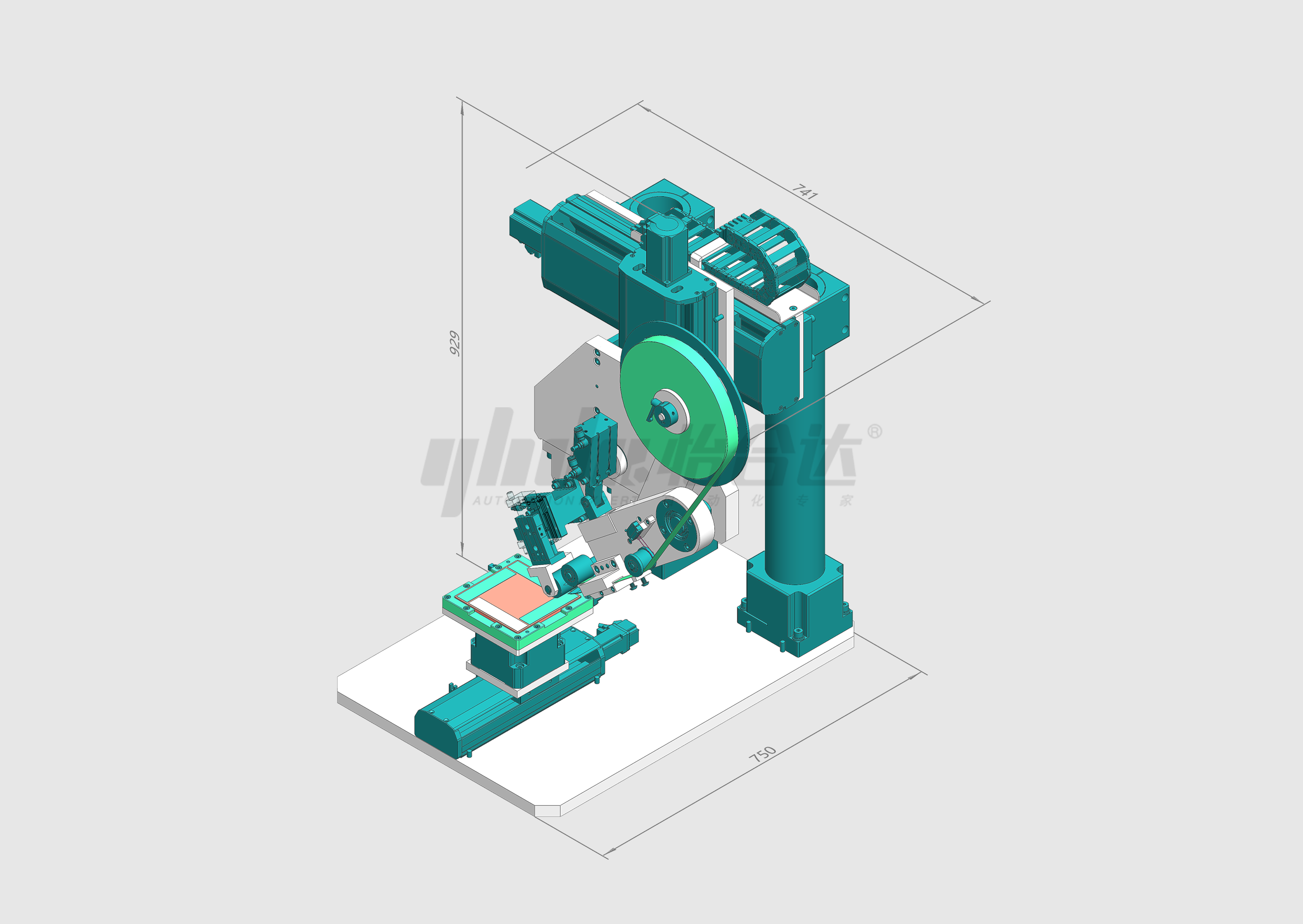
| 三、示例应用 | |
| 工件形状: | 方形,长方形 |
| 工件尺寸: | 8 x 8 x 3(mm) |
| 工件类型: | 3C |
| 工件重量: | 单个产品=0.1~10(g) (产品面积与重量成正比,与节拍速度成反比。) |
| 真空发生器性能: | 真空度P1 = 89Kpa |
| 摆臂总质量: | 240g |
| 气源: | P=0.5Mpa |
| 电源: | AC220V 50Hz / DC24V |
| 四、计算过程 | |
| (主要标准件选型计算) | |
| 负载率: | η=50% |
| 重力加速度: | g=9.8(m/s²) |
| 摩擦系数: | μ=0.06 |
| 摆臂最大半径: | R=59mm |
| 所需扭矩: | T=MgRμ=0.24 x 9.8 x 59 / 1000 x 1.06 ≈ 0.147N.m |
| 吸盘负载: | F=1.06Mg=1.06 x 10 / 1000 x 9.8 ≈ 0.1(N) |
| 所需吸力: | F0=(F/η)x100=(0.1/50) x 100 = 0.2(N) |
| 以下参考怡合达FA工厂自动化零件 选型技术资料 | |
| ZNH03-040-B 伺服电机 扭矩1.27N.m | |
| (整体设计工况计算) | |
| 1.27N.M>0.147N.M | |
| 案例所需扭矩为0.147N.M,实际扭矩为1.27N.M, 因此符合当前设计要求。 | |
| D=4mm, W=P1*S*0.1*n/t=89x0.2x0.2x3.14x0.1x1/4≈0.28(N), 0.28(N)>0.1(N) | |
| 案例所需负载为0.1N,实际负载为0.28N, 因此符合当前设计要求。 | |